Triple Play: High-End Laser Scanner Shootout
/
Third player has entered the game! When we first started building our database of laser scanned vehicles in 2020, we put a lot of research into selecting the appropriate scanner. It boiled down to FARO’s S350 and Leica’s RTC360, both solid machines that produce high-quality data. As speed and quality were paramount for our situation (we scan about 500 cars a year), the Leica was the clear winner as it can bang out beautiful scans colorized by 5X HDR photographs in less than two minutes.
You might not believe this, but we got some flack from humans on the internet about the comparison. The two most worthy complaints were the omission of Trimble’s then-spanking-new X7, and that we used 2X quality with the FARO scanner, instead of 3X. Time for a redo! NOTE: This test was performed in April of 2022, prior to our ability to get access to FARO’s new offering, the Premium series.
You might note the title image includes Leica’s BLK360 and an iPhone. Suffice it to say, the BLK360 is not a serious contender if you’re looking to scan shiny dark things, like cars. We won’t clutter this article with the nearly comical results. The iPhone was used to operate Recon-3D, which is a really powerful app powered by EveryPoint’s algorithm that fuses photogrammetry and LiDAR. That data, which is very impressive considering the source, will be served up another day.
Basic Specs
Trimble’s X7 comes with a price tag of about $50k at the time of this writing, granted your mileage may vary. The range is 80 meters (260 feet) and it’s measuring 500,000 points a second in the standard mode via a 1550 nm beam of light (same wavelength used by the FARO and Leica). One distinct advantage of the X7, is its automatic calibration, which is performed after starting a scan without the need for any user interaction. That’s a big deal, as being without your scanner for several weeks while it’s out for calibration either puts you on the sideline or requires that you own at least two scanners.

Another item in the pro column for the X7 is the laser-pointer assisted measurement. After performing a normal scan, the user can activate a visible laser pointer, aim it at something specific, and ask the X7 to measure that location. This feature instills confidence that you’re getting critical measurements when evidence still remains at the time of your inspection.
Alright, those are the basics. For a refresher on the FARO and Leica specs, check out the original article here.
The Setup
To be consistent with the first round of testing, the subject was another Tesla Model Y. Dark, lots of glass, and we scanned it on a cloudless day in Southern California. Not an easy subject or conditions, which was the point. Any scanner can generate stellar data when the subject is a dirty white car on a cloudy day, even the BLK360. The Tesla was covered with a thin layer of dust, but was essentially clean. Click play below to see a time-lapse of Miguel Garcia in action.
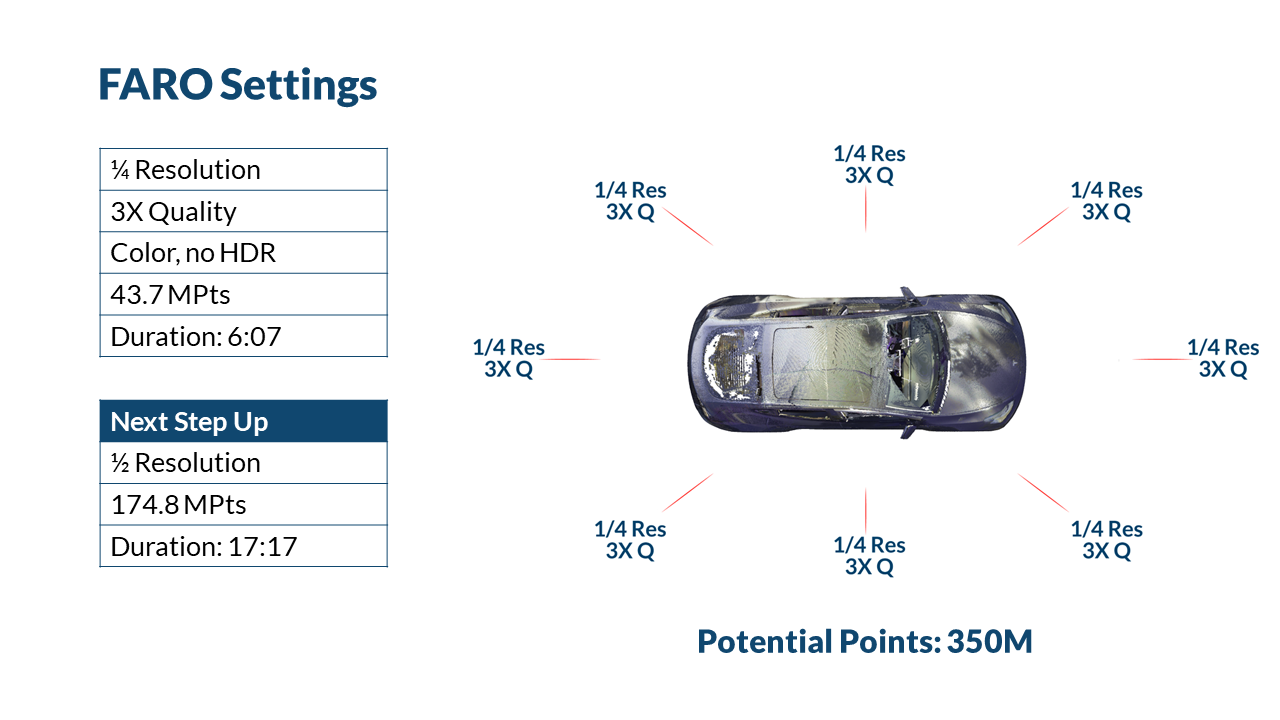
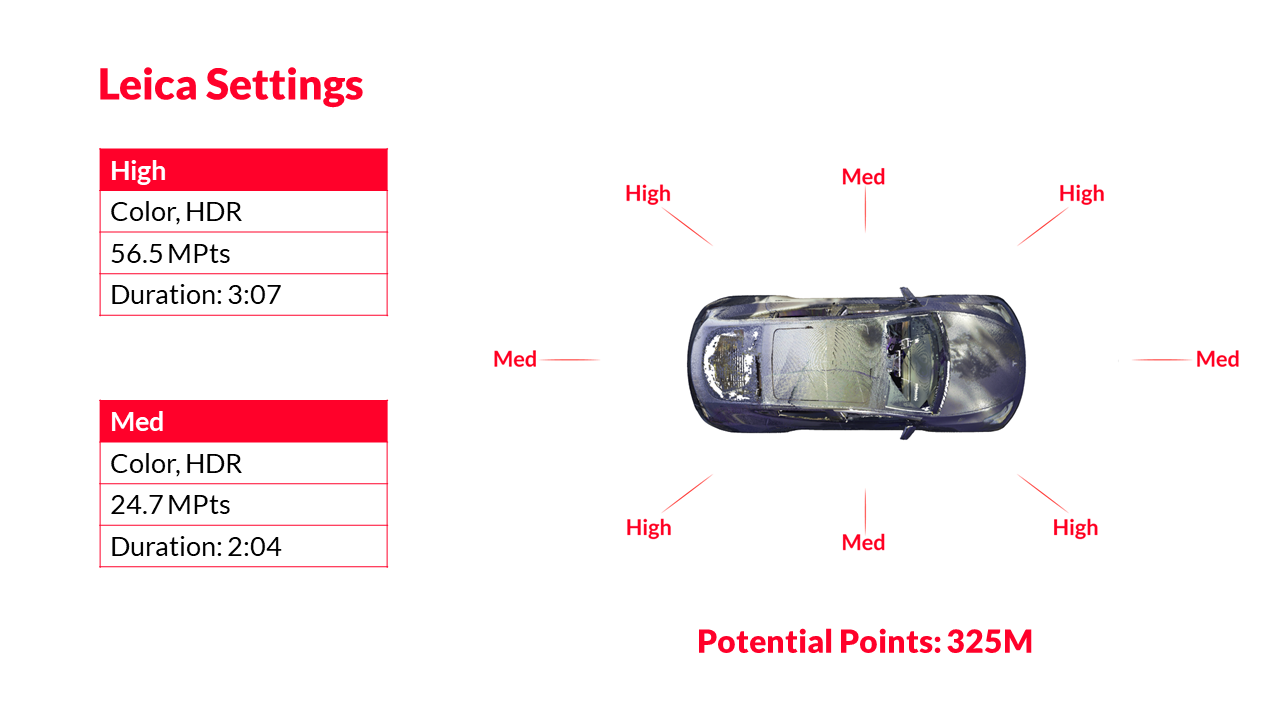
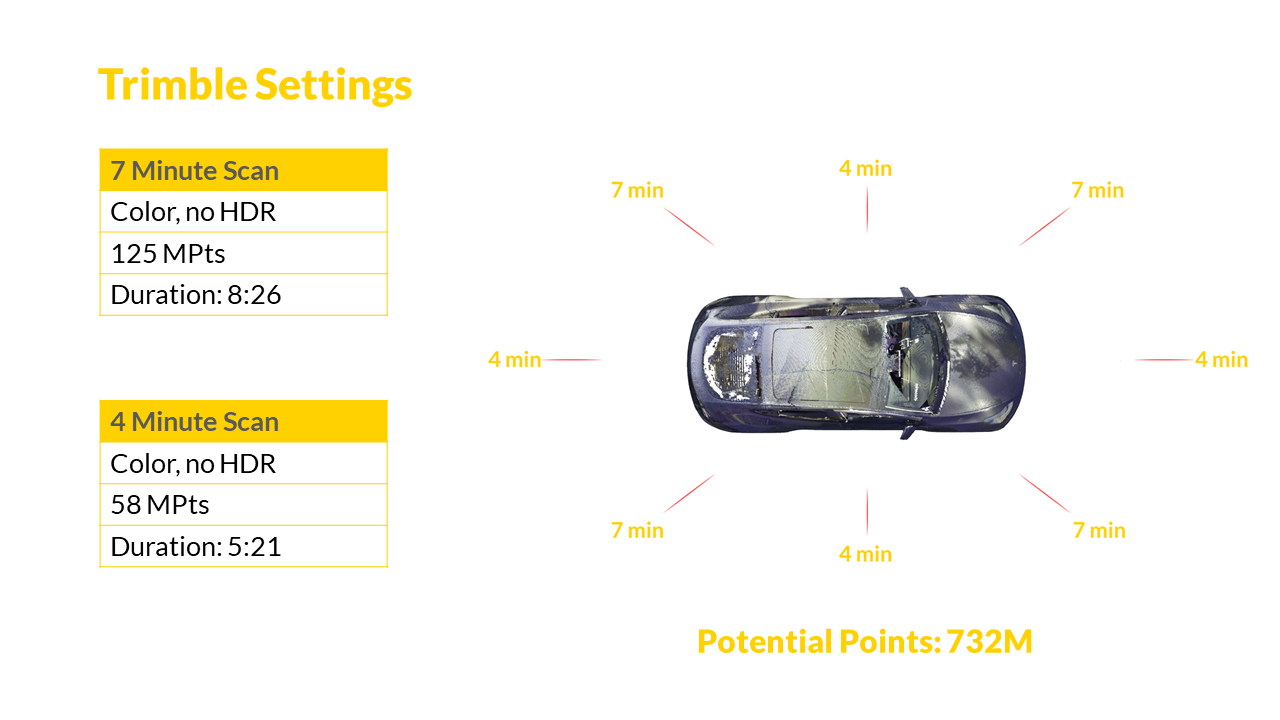
Thirteen scans of the Tesla were captured with each machine, simultaneously. Eight of the scans were focused on the exterior and five on the interior. The settings for each scanner are detailed in the graphics below, along with the duration of each scan and quantity of points that could be captured by each setup, assuming the scanner was in a cube lined with of a cooperative surface.
Results
The data from each scanner was registered using the respective native software (SCENE, Register 360, and RealWorks), cleaned by the same technician in CloudCompare, and aligned, so direct comparisons could be made. For reference, the FARO cloud was 41M points, the Leica was 44M, and the Trimble was 35M. Story by picture time. Click the arrows on each gallery to switch between the FARO, Leica, and Trimble data.














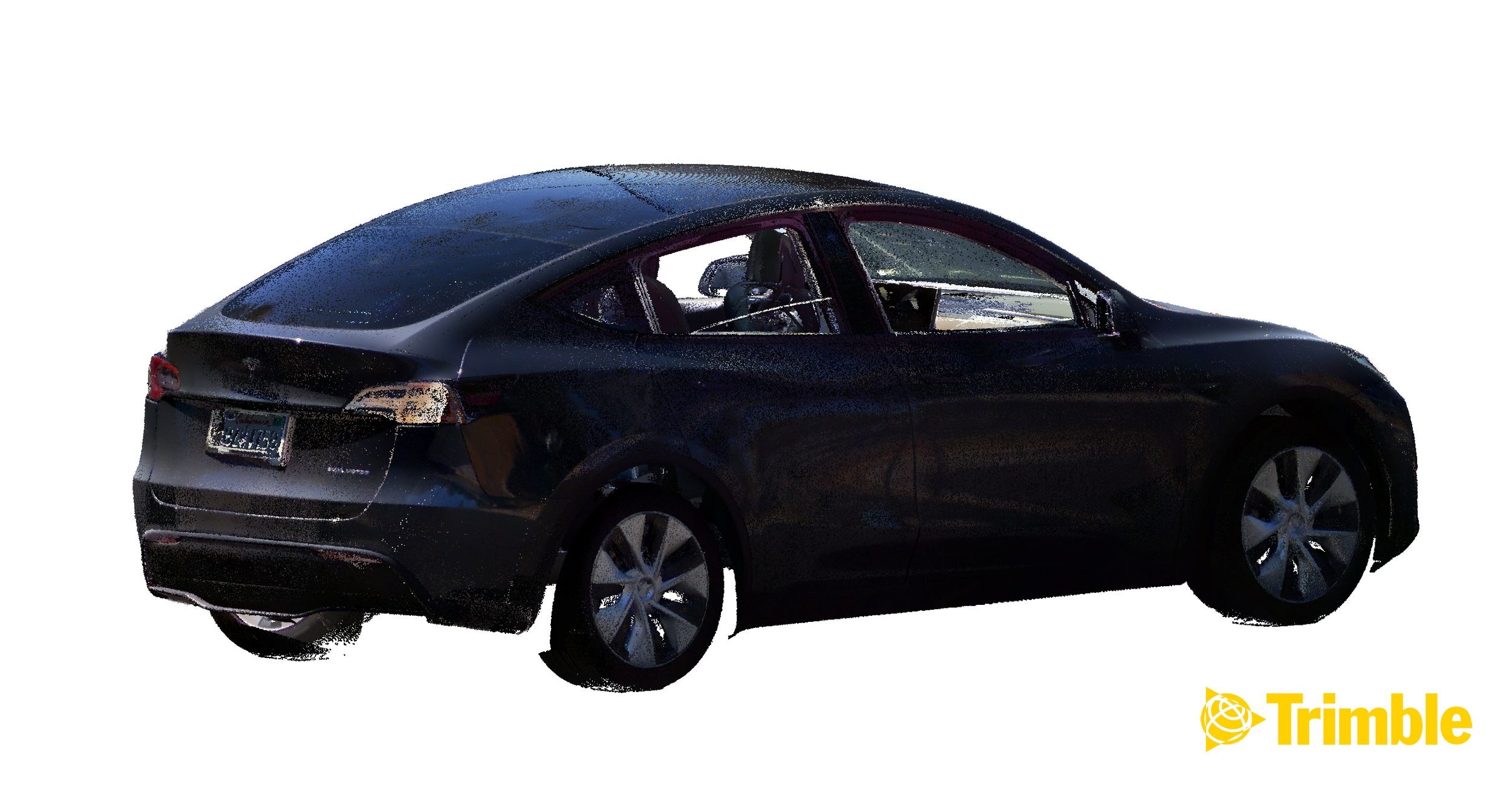


















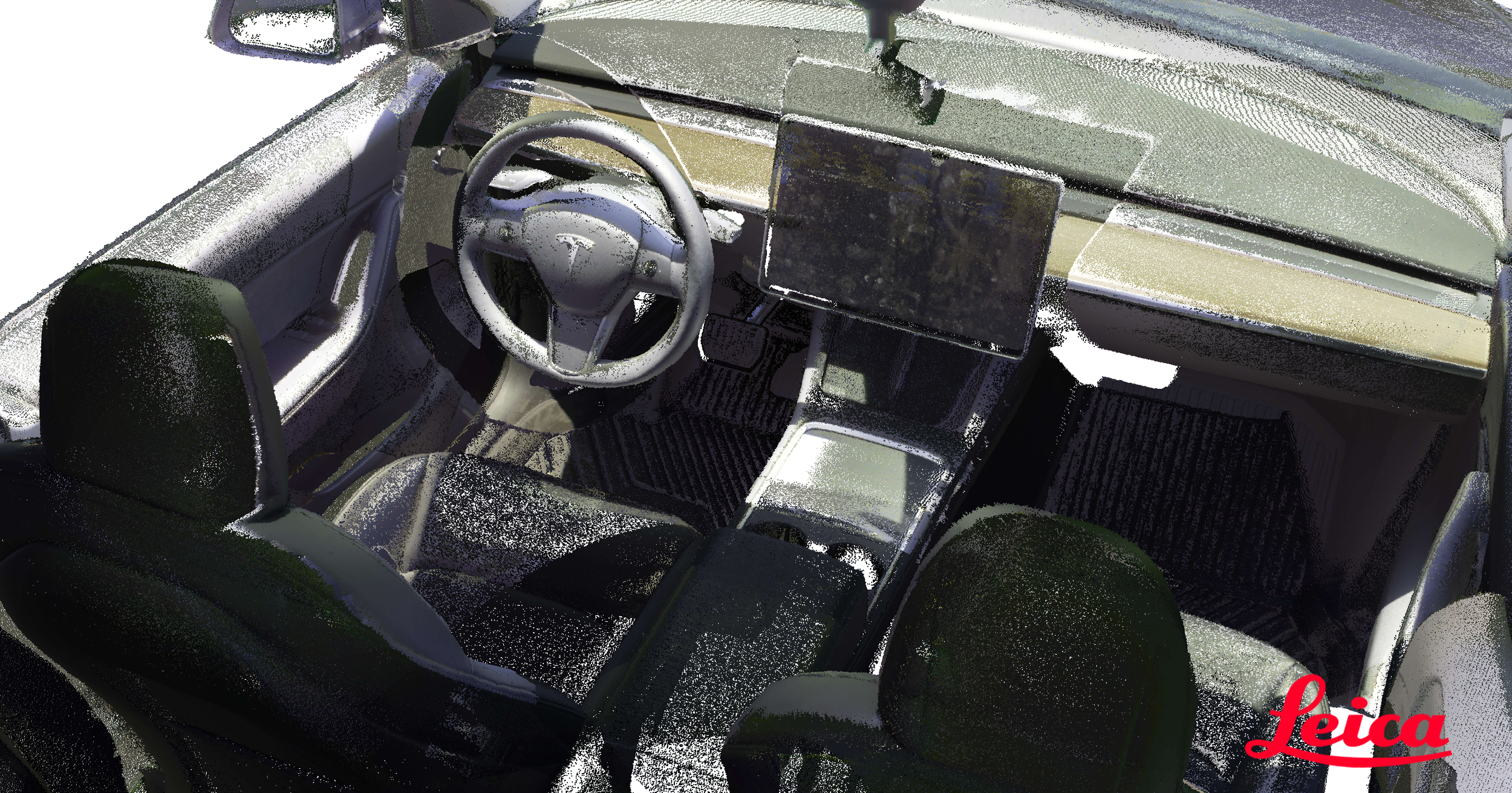

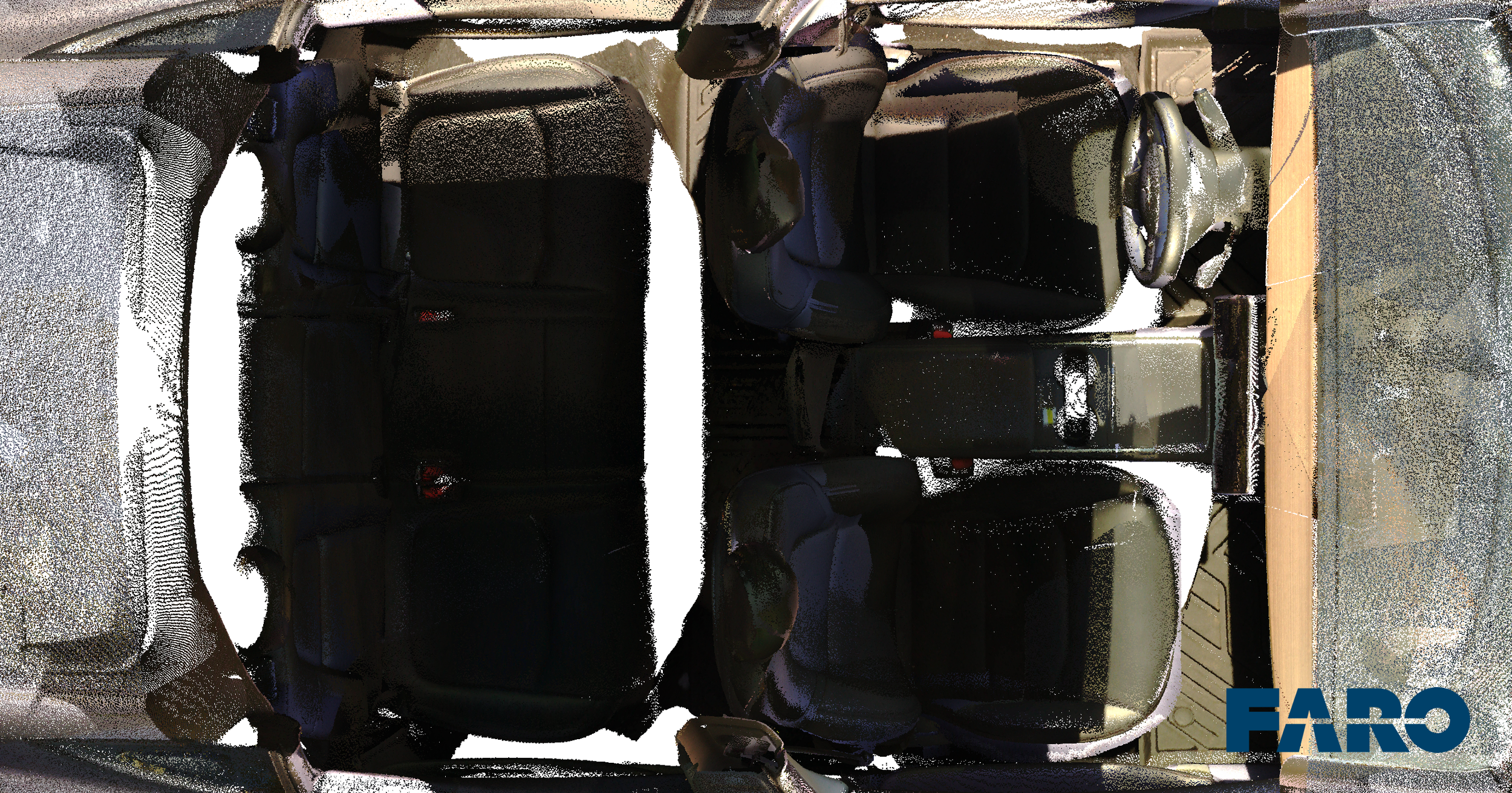
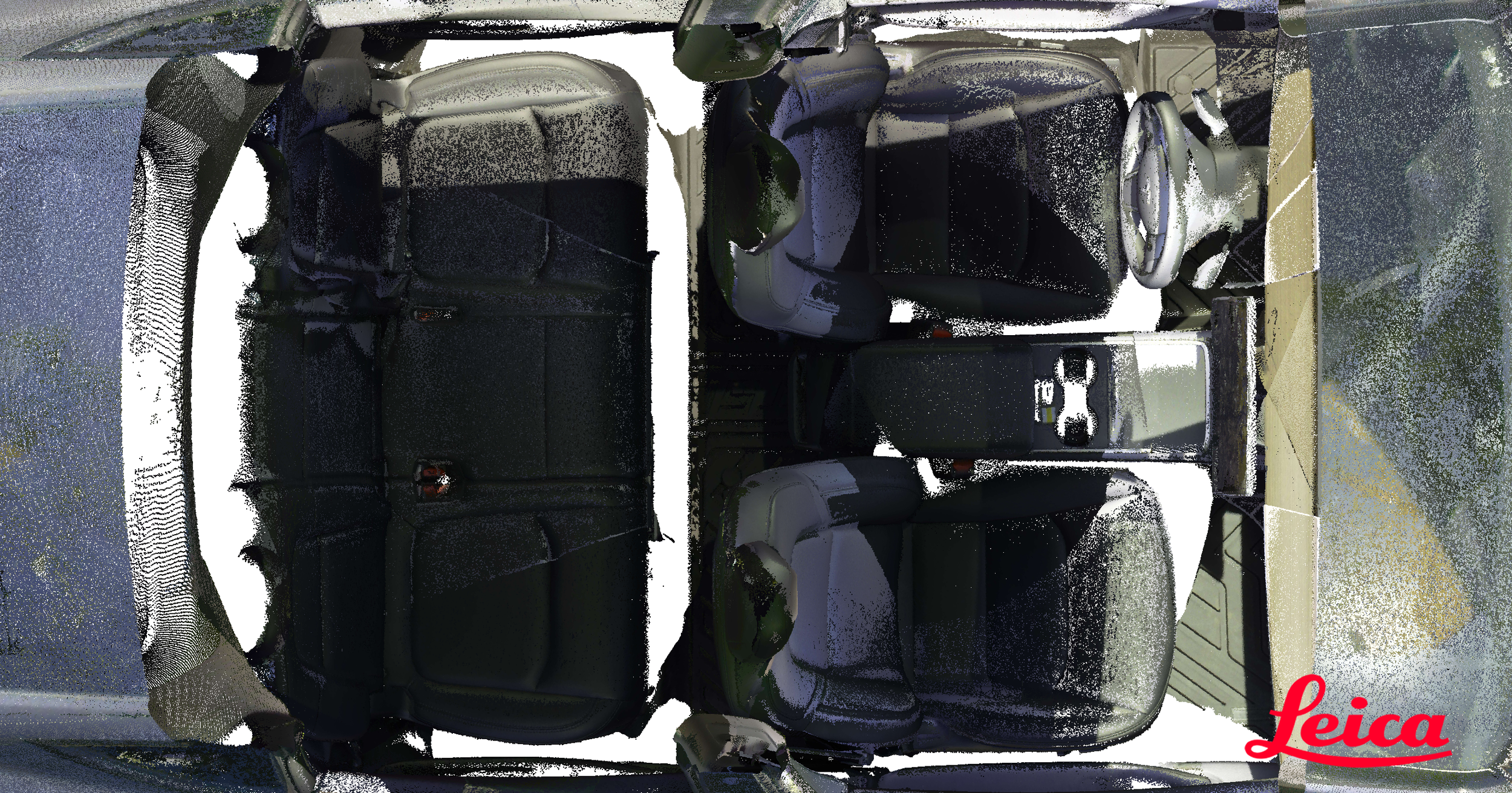
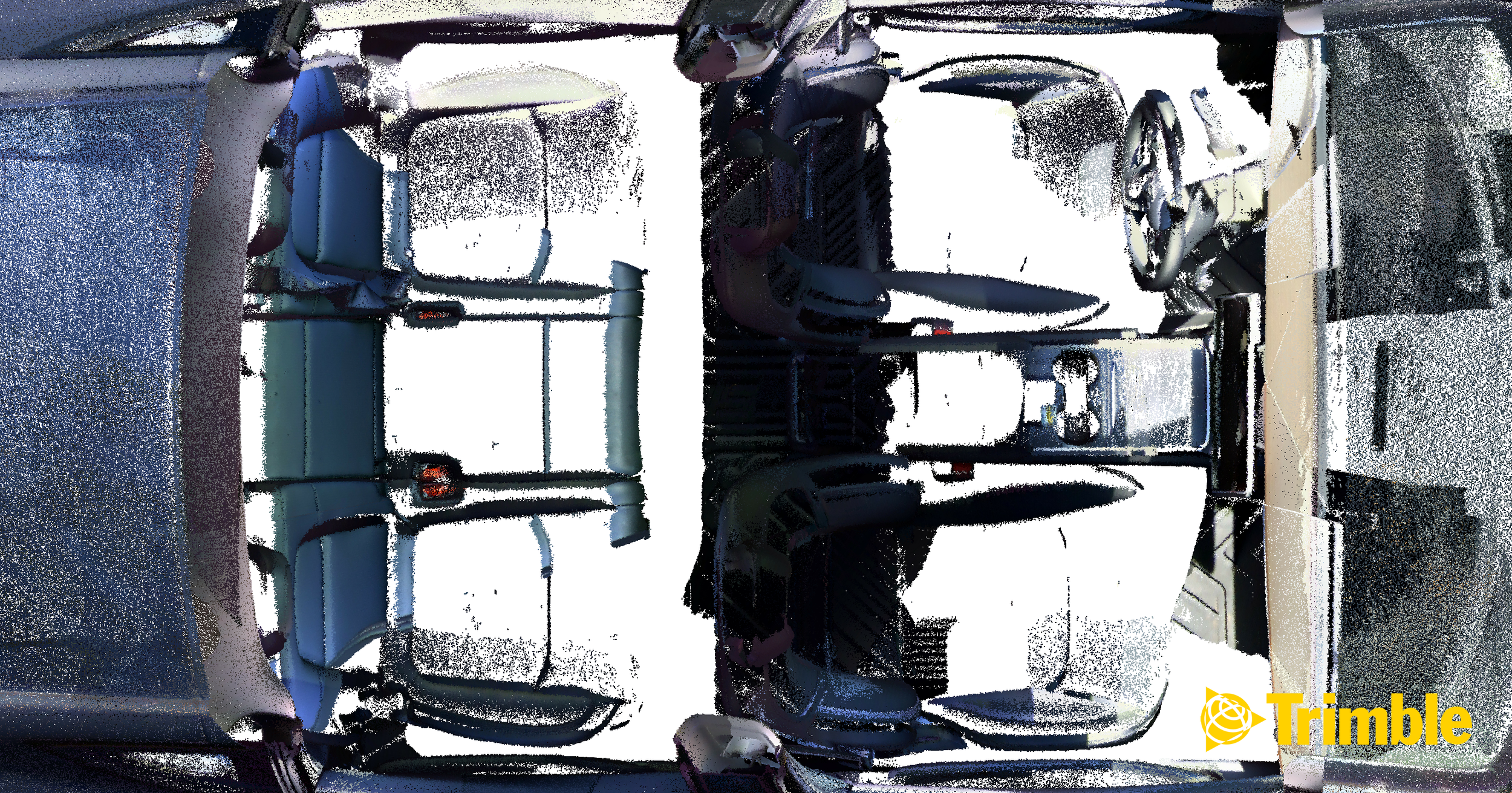
The point colorization of the FARO data consistently had a brown tint to it, which was also noted during the first round of testing (performed with the same S350). The colorization of the RTC360 was excellent, but ultimately outshined by the X7. However, the RTCs HDR photography allowed for better colorization on the dark side of the vehicle (see right side imagery above). The FARO did the best colorizing the interior. While the Leica did a solid job, it was a bit dull with respect to true color. The X7 had little to colorize with respect to the interior, as it struggled to capture data from the Tesla’s black pleather (shown below). Some additional scans were performed using the high sensitivity settings with little improvement.

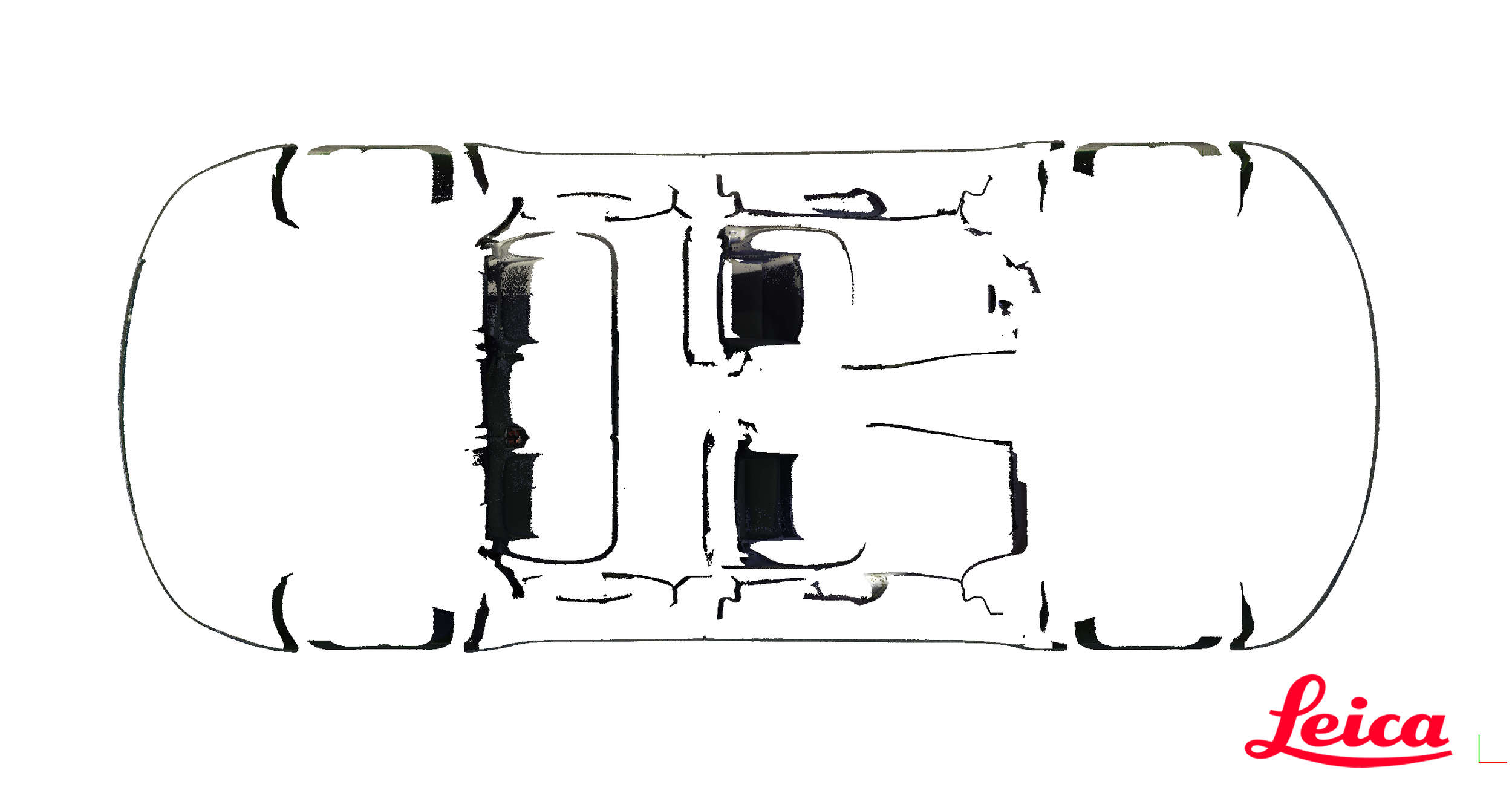
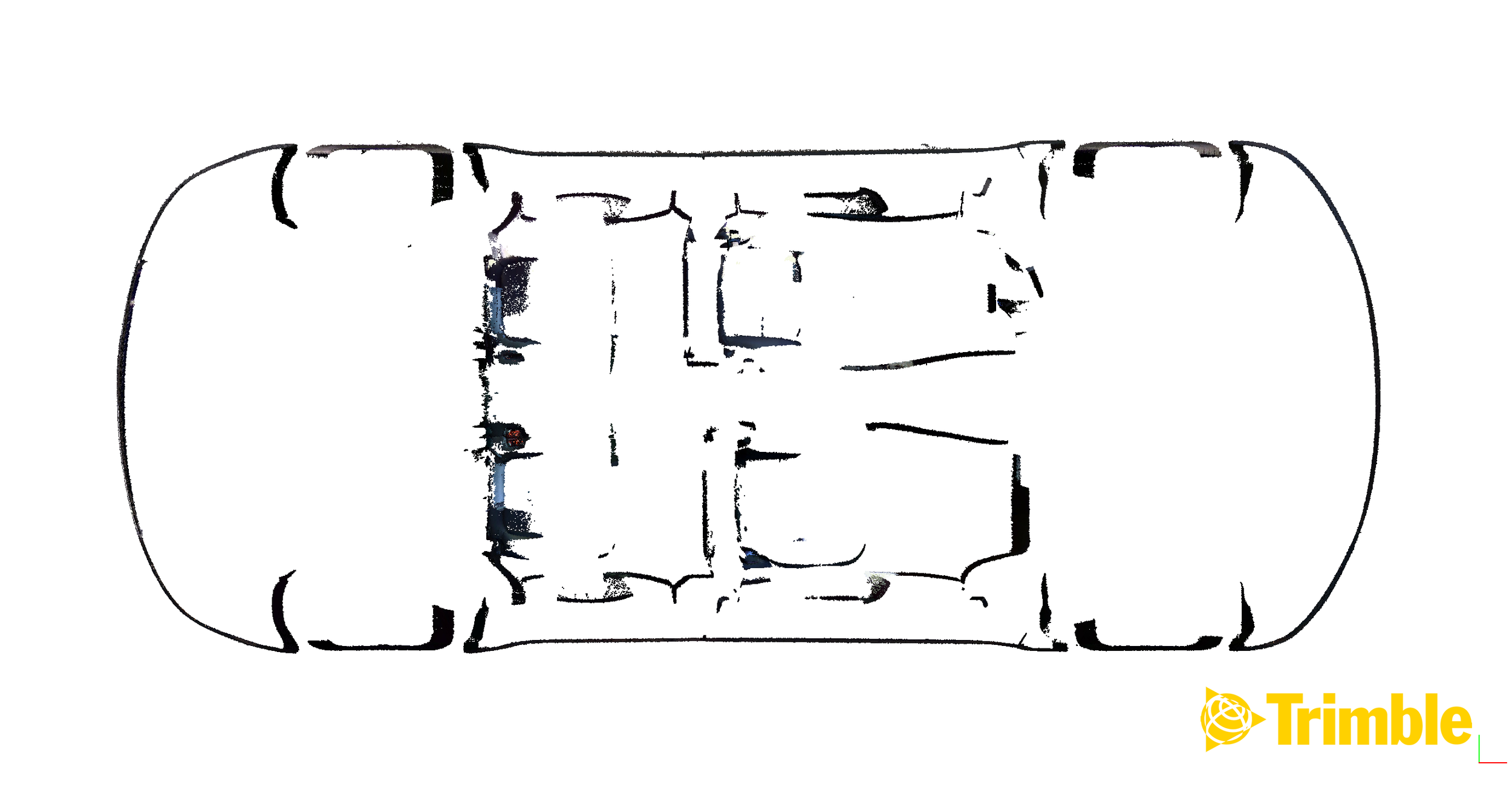
The close-up renderings show the RTC360 generated the most dense point cloud for the vehicle’s exterior. In addition, the RTC360 data is also the cleanest (lacking noise) as is observed in the aerial slice.
Speed. Oh the importance of speed. I suppose it all depends on your personality and workflow. My head and practice benefit greatly from scanning speed. For the protocol performed here, the Leica scan duration was 31 minutes while the S350 and X7 both took about 1 hour and 20 minutes, 2.6 times longer. Granted, considering the price of each machine, you can almost get two S350s or X7s for the price of a single RTC360. Bringing two scanners to the party will get you closer to the RTC speed, but you’ll still be shy. There are benefits to having two scanners: they can be split up to perform simultaneous inspections and you have a backup if one fails, or while one is out for calibration. However, two scanners require double the maintenance, and inspections become a bit more cumbersome. Different strokes for different folks. In my opinion, the RTC360 is the best scanner on the market, but that doesn’t necessarily mean it’s the best scanner for your situation. It depends on how you value speed, budget, and data quality.
Comparison of Measurements
These are all high caliber scanners from reputable scientific companies. As such, there’s little doubt each machine is producing reliable and accurate measurements. However, to be sure, we aligned the datasets using CloudCompare’s Iterative Closest Point algorithm, where the position and orientation of each point cloud is varied until the point-to-point distance is minimized. From there, the cloud-to-cloud distances were calculated. The data from all three scanners is shown below. Notice, the vast majority of points were within 1/100th of a foot of each other (3 mm).

Cloud-to-cloud distance between faro and leica.

Cloud-to-cloud distance between faro and Trimble.

Cloud-to-cloud distance between trimble and leica.
That’s a wrap! Hopefully that provides enough detailed information for you and your group to decide which scanner is best for your situation. If you have any questions or would like to explore the foundational data, please email Sam at smccool@lightpointscientific.com.
Conclusions
Trimble joined the scanning party with a SOLID offering. The X7 produces excellent data with great color, doesn’t require annual calibration, and offers directed measurement of evidence.
The trusty FARO S350 produces solid measurements, but colorization is mediocre at the tested settings. However, the FARO ecosystem is battle-tested and the S350 is the cheapest scanner of the bunch, while still highly capable.
Leica’s RTC360 remains the king, producing the best data in a fraction of the time. The only down side is the hefty price tag.
If you’d like to get a heads-up when similar articles and data are published, please join our newsletter here. We won’t inundate your inbox, promise.