sent on march 20, 2026
Stuck speedos and tachs are fairly common in the age of stepper motors, but can you trust where the needle landed?
As detailed in this To the Point, evaluating the reliability of stepper-motor needle position requires looking at three key aspects:
Static torque required to move the needle
Nature of the impact
Timing of the power loss
Today, we’re focusing on static torque. In this paper, Chris Goddard and David Price grouped stepper motors into four categories based on their resistance:
A: The needle slips on the shaft before the motor turns (very high resistance)
B: Static torque = ~ 1 mN-m
C: Static torque < 0.5 mN-m
D: Static torque = negligible
As far as I can tell, Bob Anderson was the first to measure this (way back in 2010). He accomplished this by hanging weights from the needle at varying distances from the shaft until movement occurred.
That’s still the best move. Test the subject gauge, or an exemplar, by hanging weights from the needle. Here’s what it looks like:

You don’t need much to perform the testing. I use these weights, some safety wire, the vise mentioned in this email, and a set of calipers to measure the lever arm.
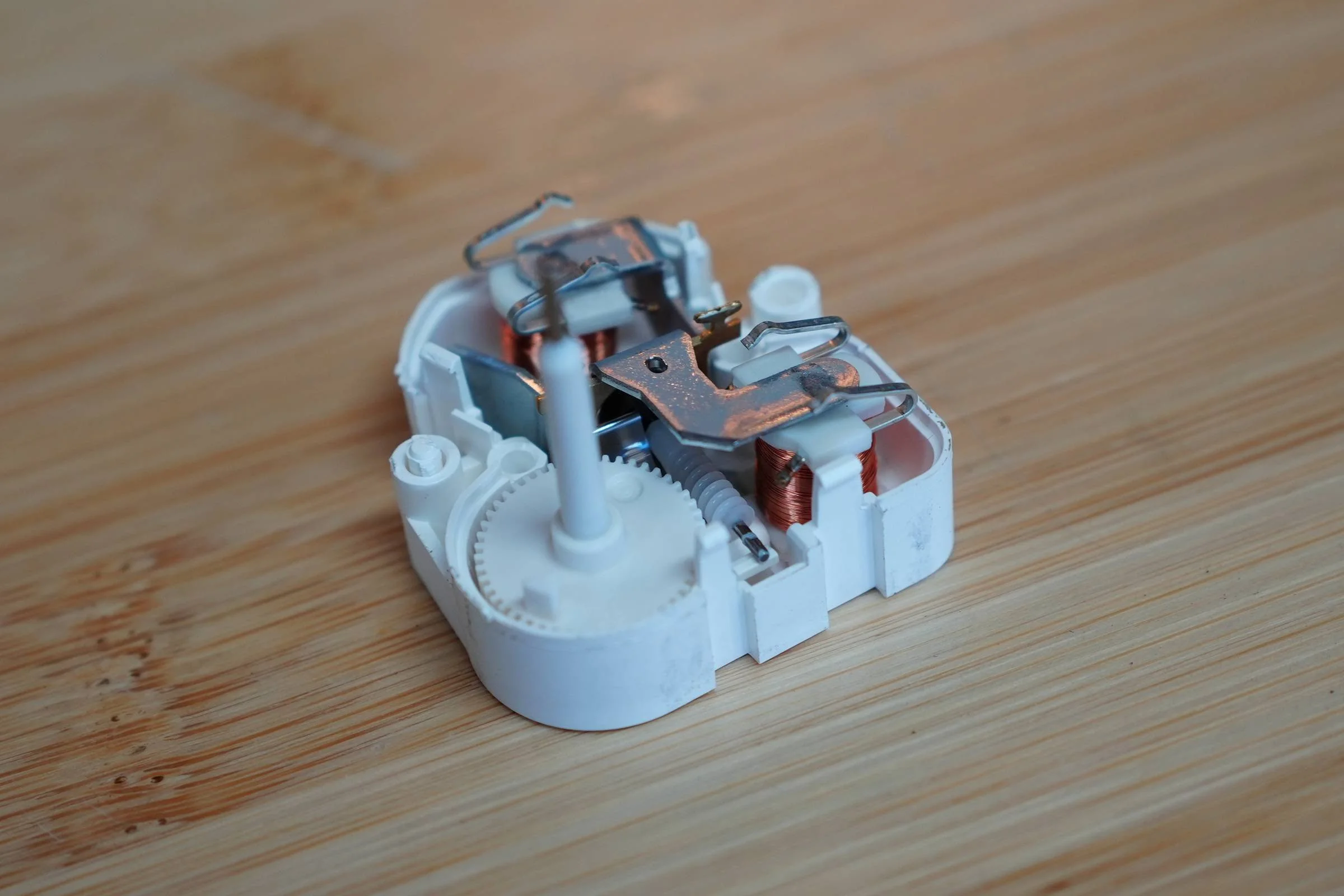
From there, you’re in a good position to determine the reliability of the reading. If you’re able to get more down and more dirty, disassemble the gauge to access the stepper motor itself. Comparing the internals to known literature, especially if you find a stubborn worm-driven assembly like the one below, can significantly increase your confidence.
Paul Montalbano, et al. has done some excellent work in this arena. In this paper, he recommends considering needle latency too (how long it takes the needle to react). Sage advice and a topic for a future email. Ed Fatzinger and Tyler Shaw also wrote a great paper worth checking out here. Lots of reading if you want to go down the rabbit hole!
I hope this helps with your next stuck speedo case. Thanks for reading, keep learning!
Lou Peck
Lightpoint | JS Forensics